Regards
David
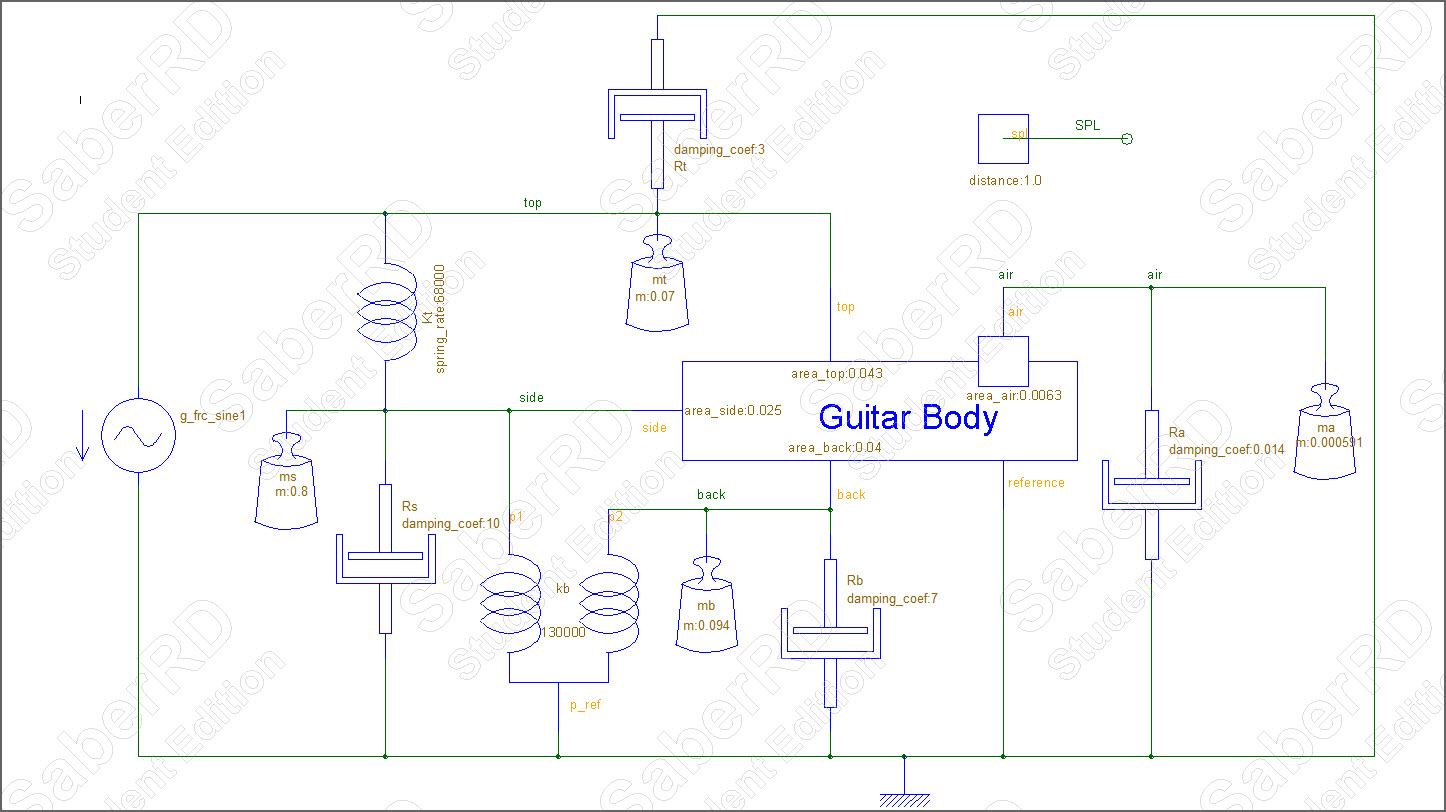

If I'm understanding your model, it looks like you have all positive motion in the same direction. In the book model I have defined positive as outward from the guitar body. This may explain the sign difference. As we saw when I demonstrated the model in the class, coupling is happening. If not, when I changed the back stiffness (for example) it would not affect the other resonators, which it clearly did.dwsdolce wrote:Another way to look at it is to ask the question: Is there any force applied to the back from the side or to the side from the back. In your equation there is not. If there were coupled then the term would be Kb(ys - yb) in the side equation and Kb(yb-ys) in the back equation.
 .
. Users browsing this forum: No registered users and 4 guests